Cooking with the robot
Micro UX - Week 2
Brief: Design the social relations and interactions between a robot chef and its human guests.
Team: Tiana, Ana, Sanjana, Sylvester
Semiotic, Laban, Multimodal
Based on the feedback, I looked up the semiotic approach of behaviour analysis. In general, semiotics is the study of meaning, which studies how the human mind makes sense of its experience in the world of objects. In the cooking process, we noticed that multiple signifiers such as gestures, verbal communication, aroma and visual signal of the food could imply different signified social meaning. It would be helpful for us to identify the signifiers and signified in a specific cooking or dining context to generate interactions.


Sanjana took another approach to Laban’s Movement Analysis, which studies human body movement in space, shape and effort.


Cooking with robot
On Tuesday, we planned an experiment with two groups. We asked them to make nachos, with one of us being a robot. Simulating the way Moley Robot runs, the human chef would have to prepare and allocate all ingredients in advance and start the robot. During the experiment, we arranged an error state in between to see how people react.
Analysis
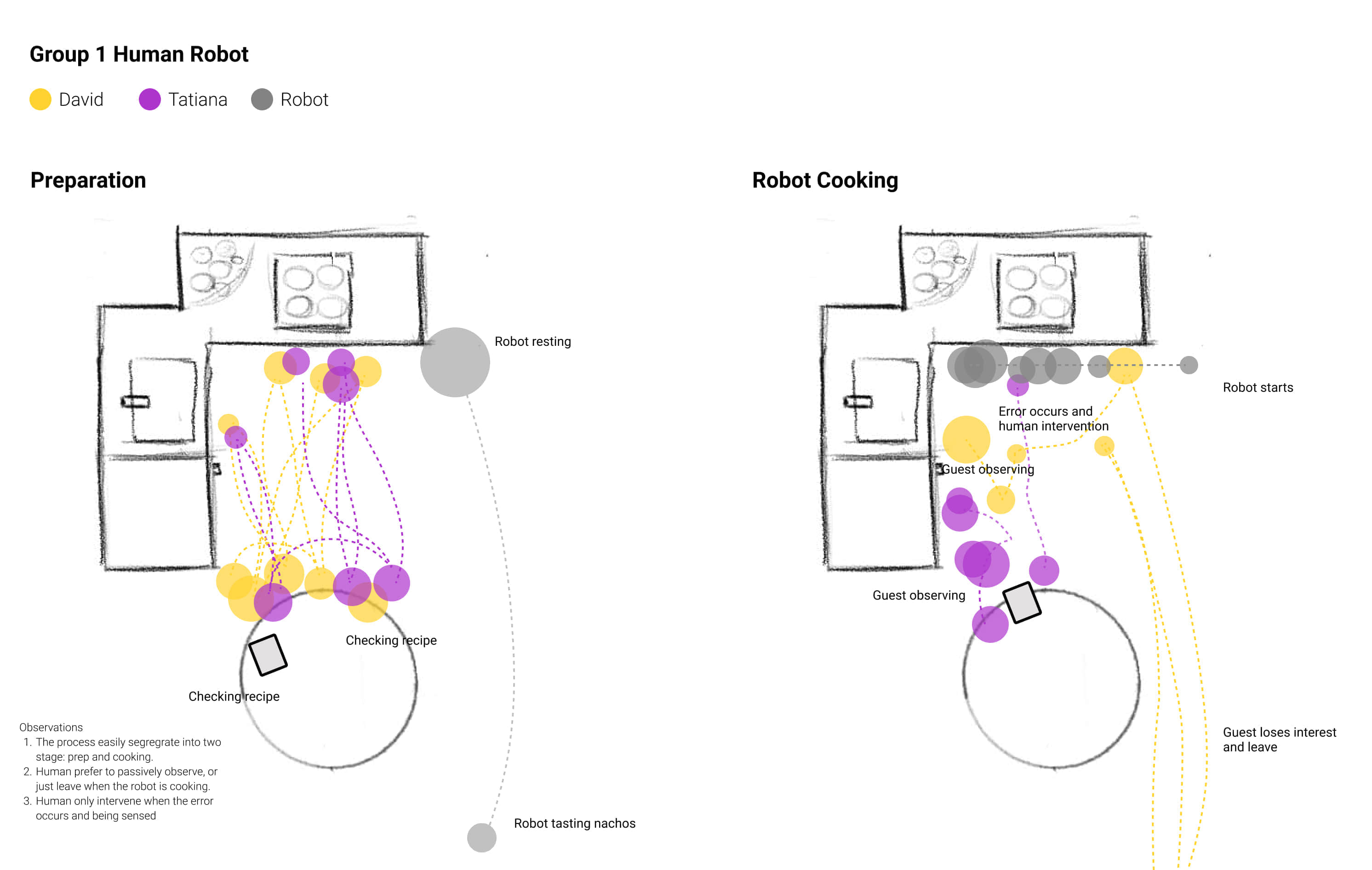
The experiments of both groups are pretty similar: human guests were not familiar with nachos (neither do I), resulting in spending a lot of time All of them didn’t ask the robot for help at all!_ Comparing to a regular process, participants have to put ingredients on corresponding plates at a precise amount. After preparation, human guests activated the robot, almost like pushing the start button on the oven. We noticed that our participants would observe the robotic performance for a minute and quickly lost interest.

Looking at the traffic flow diagram above, we can discern clear segregation between human and robot interplays. The only worth mentioned interaction of the two counterparts arose when it came to designed error. The experiment set aims to simulate the preparation and cooking interaction of the current Moley Robot, which reveals the missing human-robot interactions.
“The kitchen is no longer a social place.”
However, do we really need human-robot interaction? When losing patience, human guest joined other social activity during our experiment.
👉🏻 See Week 3: String Puppet